Loading...
Searching...
No Matches
bundle_utils.h File Reference
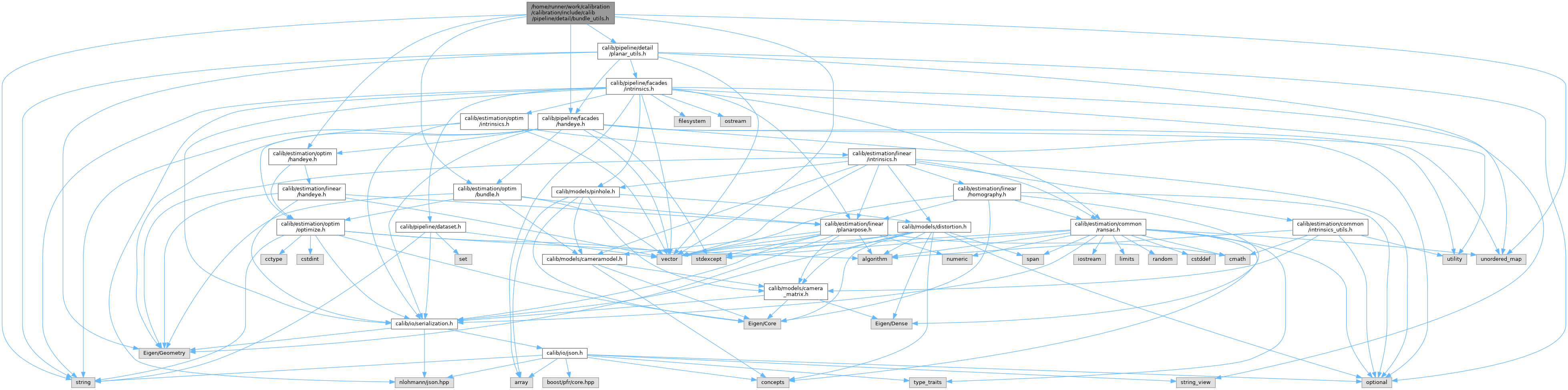
#include <string>#include <unordered_map>#include <vector>#include "calib/estimation/optim/bundle.h"#include "calib/estimation/optim/handeye.h"#include "calib/pipeline/detail/planar_utils.h"#include "calib/pipeline/facades/handeye.h"
Include dependency graph for bundle_utils.h:
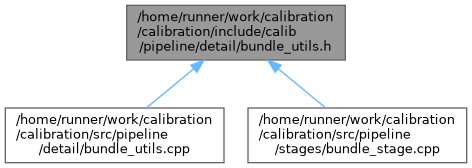
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
| namespace | calib::pipeline |
| namespace | calib::pipeline::detail |
Functions | |
| auto | calib::pipeline::detail::collect_bundle_sensor_setup (const BundleRigConfig &rig, const std::unordered_map< std::string, IntrinsicCalibrationOutputs > &intrinsics) -> BundleSensorSetup |
| const std::vector< HandEyeObservationConfig > * | calib::pipeline::detail::select_bundle_observations (const BundleRigConfig &rig, const HandEyePipelineConfig *handeye_cfg) |
| auto | calib::pipeline::detail::collect_bundle_observations (const std::vector< HandEyeObservationConfig > &observation_config, const std::vector< std::string > &sensors, const std::unordered_map< std::string, std::size_t > &sensor_to_index, const std::unordered_map< std::string, SensorDetectionsIndex > &sensor_index, const std::unordered_map< std::string, IntrinsicCalibrationOutputs > &intrinsics) -> BundleViewProcessingResult |
| auto | calib::pipeline::detail::compute_handeye_initialization (const BundleRigConfig &rig, const std::unordered_map< std::string, std::unordered_map< std::string, HandeyeResult > > &handeye_results, const std::vector< SensorAccumulator > &accumulators) -> HandeyeInitializationResult |
| auto | calib::pipeline::detail::choose_initial_target (const BundleRigConfig &rig, const std::vector< SensorAccumulator > &accumulators, const std::vector< Eigen::Isometry3d > &init_g_se3_c) -> TargetInitializationResult |