Loading...
Searching...
No Matches
ransac.h File Reference
#include <algorithm>#include <cmath>#include <concepts>#include <cstddef>#include <iostream>#include <limits>#include <numeric>#include <optional>#include <random>#include <span>#include <stdexcept>#include <type_traits>#include <unordered_map>#include <vector>#include "calib/io/serialization.h"
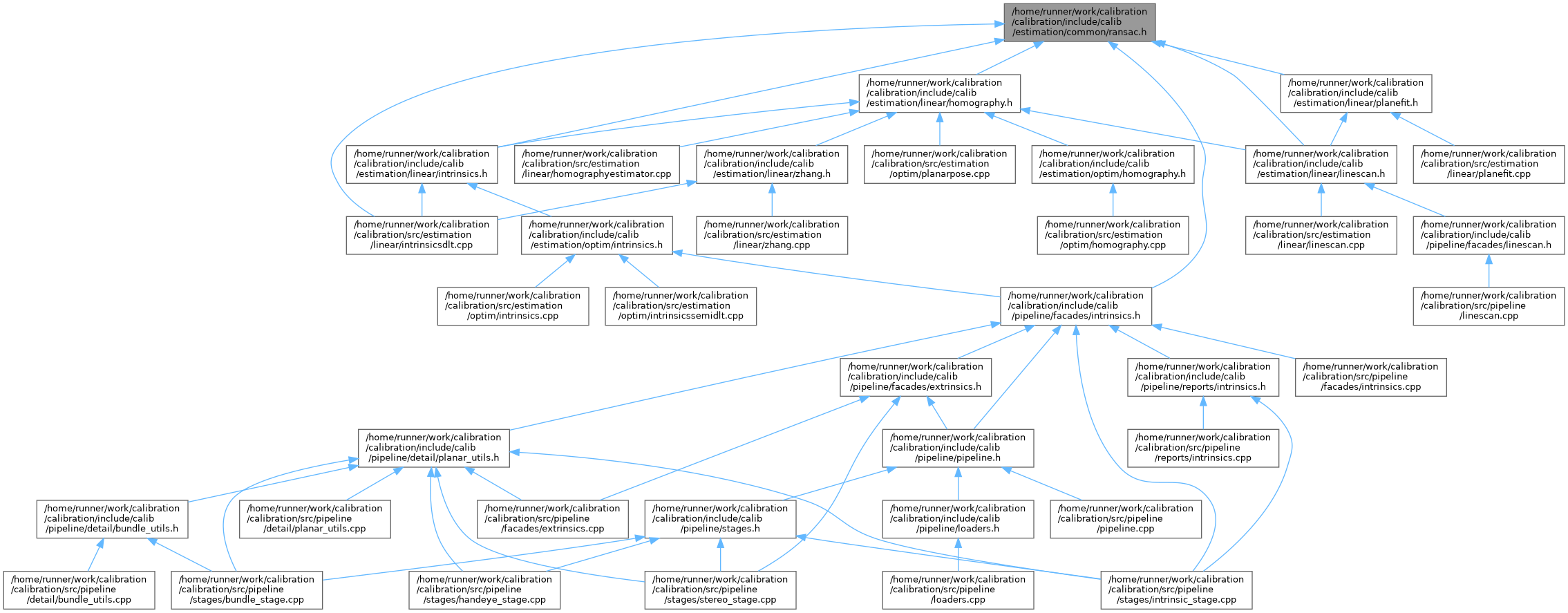
Include dependency graph for ransac.h:

This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | calib::RansacOptions |
| struct | calib::RansacResult< ModelT > |
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
| namespace | calib::detail |
Concepts | |
| concept | calib::detail::HasRefit |
| concept | calib::detail::HasDegeneracyCheck |
Functions | |
| auto | calib::detail::rms (const std::vector< double > &vals) -> double |
| int | calib::detail::calculate_iterations (double confidence, double inlier_ratio, int min_samples, int iters_so_far, int max_iters) |
| template<typename Estimator , typename Model > | |
| void | calib::detail::find_inliers (const std::vector< typename Estimator::Datum > &data, const Model &model, double threshold, std::vector< int > &inliers, std::vector< double > &inlier_residuals) |
| template<typename Estimator , typename Model > | |
| auto | calib::detail::refit_model (const std::vector< typename Estimator::Datum > &data, const Model &model, const std::vector< int > &inliers, double threshold, std::vector< int > &updated_inliers, std::vector< double > &updated_residuals) -> Model |
| auto | calib::detail::is_better_model (bool has_current_best, size_t new_inlier_count, double new_inlier_rms, size_t best_inlier_count, double best_inlier_rms) -> bool |
| template<class Estimator > | |
| auto | calib::ransac (const std::vector< typename Estimator::Datum > &data, const RansacOptions &opts={}) -> RansacResult< typename Estimator::Model > |