Loading...
Searching...
No Matches
intrinsics.cpp File Reference
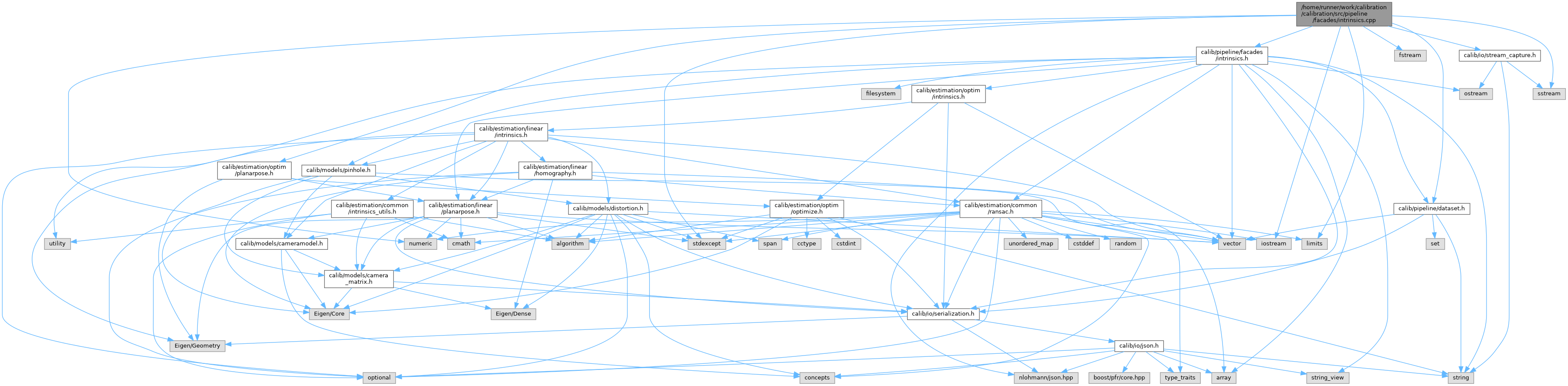
#include "calib/pipeline/facades/intrinsics.h"#include <fstream>#include <iostream>#include <limits>#include <numeric>#include <sstream>#include <stdexcept>#include "calib/estimation/optim/planarpose.h"#include "calib/io/stream_capture.h"#include "calib/pipeline/dataset.h"
Include dependency graph for intrinsics.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
| namespace | calib::pipeline |
Functions | |
| auto | calib::pipeline::collect_planar_views (const PlanarDetections &detections, const IntrinsicCalibrationOptions &opts, std::vector< ActiveView > &views) -> std::vector< PlanarView > |
| auto | calib::pipeline::bounds_from_image_size (const std::array< int, 2 > &image_size) -> CalibrationBounds |
| void | calib::pipeline::print_calibration_summary (std::ostream &out, const CameraConfig &cam_cfg, const IntrinsicCalibrationOutputs &outputs) |
| auto | calib::pipeline::load_calibration_config_impl (const std::filesystem::path &path) -> IntrinsicCalibrationConfig |
| auto | calib::pipeline::load_calibration_config (const std::filesystem::path &path) -> std::optional< IntrinsicCalibrationConfig > |