Loading...
Searching...
No Matches
handeye.h File Reference
Pipeline configuration helpers for hand-eye and bundle adjustment stages. More...
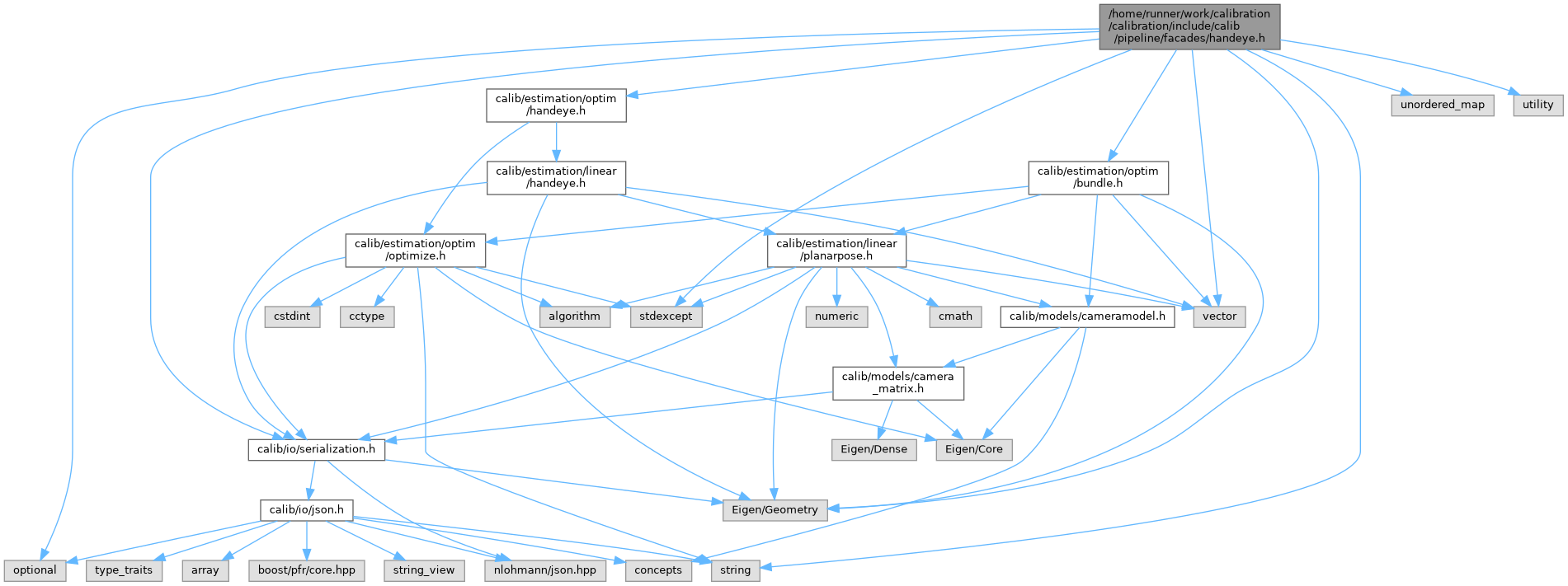
#include <optional>#include <stdexcept>#include <string>#include <unordered_map>#include <utility>#include <vector>#include <Eigen/Geometry>#include "calib/estimation/optim/bundle.h"#include "calib/estimation/optim/handeye.h"#include "calib/io/serialization.h"
Include dependency graph for handeye.h:
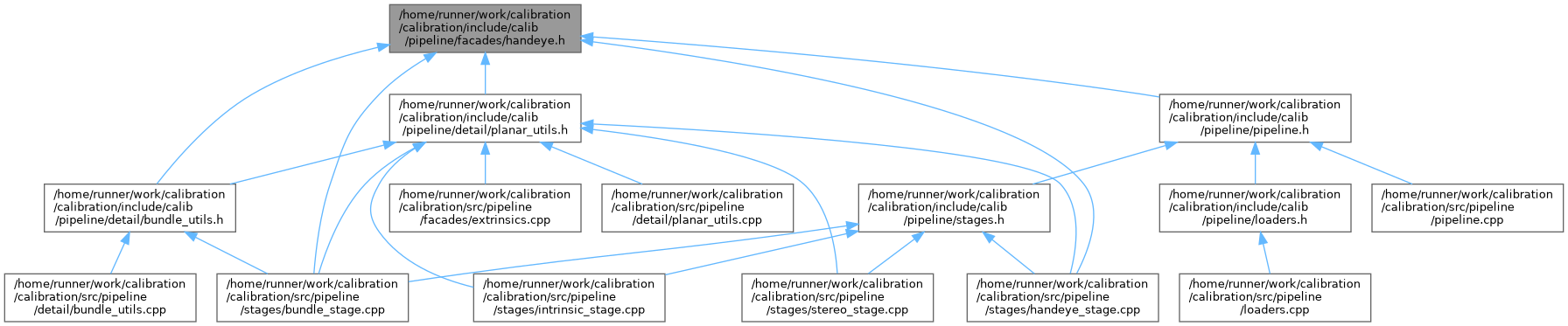
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | calib::pipeline::HandEyeObservationConfig |
| Per-observation specification consumed by the hand-eye pipeline stage. More... | |
| struct | calib::pipeline::HandEyeRigConfig |
| Hand-eye rig definition used to configure the calibration stage. More... | |
| struct | calib::pipeline::HandEyePipelineConfig |
| struct | calib::pipeline::BundleRigConfig |
| Bundle-adjustment rig configuration extending the hand-eye observations. More... | |
| struct | calib::pipeline::BundlePipelineConfig |
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
| namespace | calib::pipeline |
Detailed Description
Pipeline configuration helpers for hand-eye and bundle adjustment stages.
Definition in file handeye.h.