Loading...
Searching...
No Matches
intrinsics.h File Reference
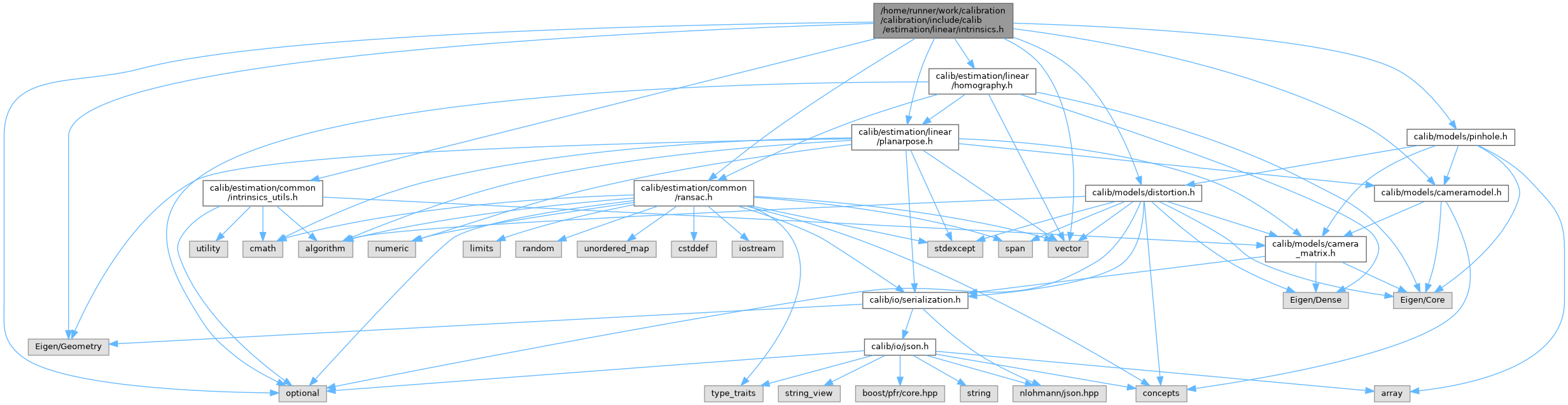
#include <Eigen/Geometry>#include <optional>#include <vector>#include "calib/estimation/common/intrinsics_utils.h"#include "calib/estimation/common/ransac.h"#include "calib/estimation/linear/homography.h"#include "calib/estimation/linear/planarpose.h"#include "calib/models/cameramodel.h"#include "calib/models/distortion.h"#include "calib/models/pinhole.h"
Include dependency graph for intrinsics.h:
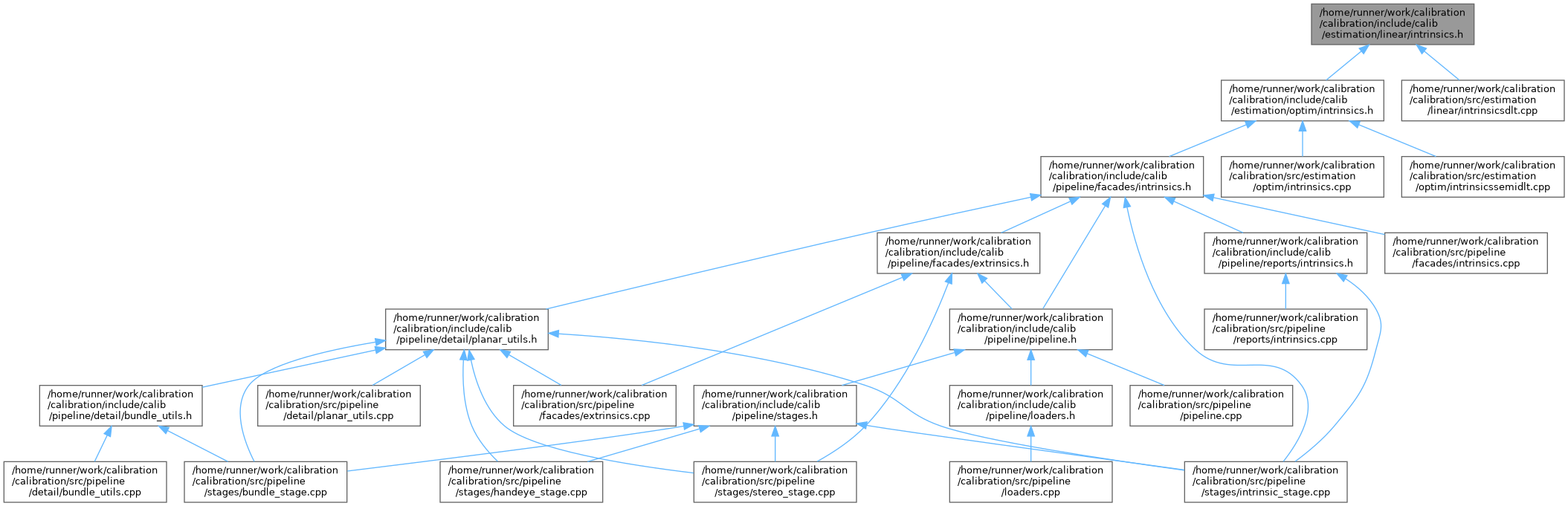
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | calib::IntrinsicsEstimOptions |
| Options for linear intrinsic estimation from planar views. More... | |
| struct | calib::ViewEstimateData |
| struct | calib::IntrinsicsEstimateResult |
| Result of linear intrinsic estimation. More... | |
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
Functions | |
| auto | calib::estimate_intrinsics (const std::vector< PlanarView > &views, const IntrinsicsEstimOptions &opts={}) -> IntrinsicsEstimateResult |
| Estimate camera intrinsics from planar views using a linear method. | |
| auto | calib::estimate_intrinsics_linear (const std::vector< Observation< double > > &observations, std::optional< CalibrationBounds > bounds=std::nullopt, bool use_skew=false) -> std::optional< CameraMatrix > |
| Linear estimate with normalized observations. | |
| auto | calib::estimate_intrinsics_linear_iterative (const std::vector< Observation< double > > &observations, int num_radial, int max_iterations=k_default_max_iterations, bool use_skew=false) -> std::optional< PinholeCamera< BrownConradyd > > |
Variables | |
| constexpr int | calib::k_default_max_iterations = 5 |
| Improved linear initialization with distortion estimation. | |