Loading...
Searching...
No Matches
intrinsics.cpp File Reference
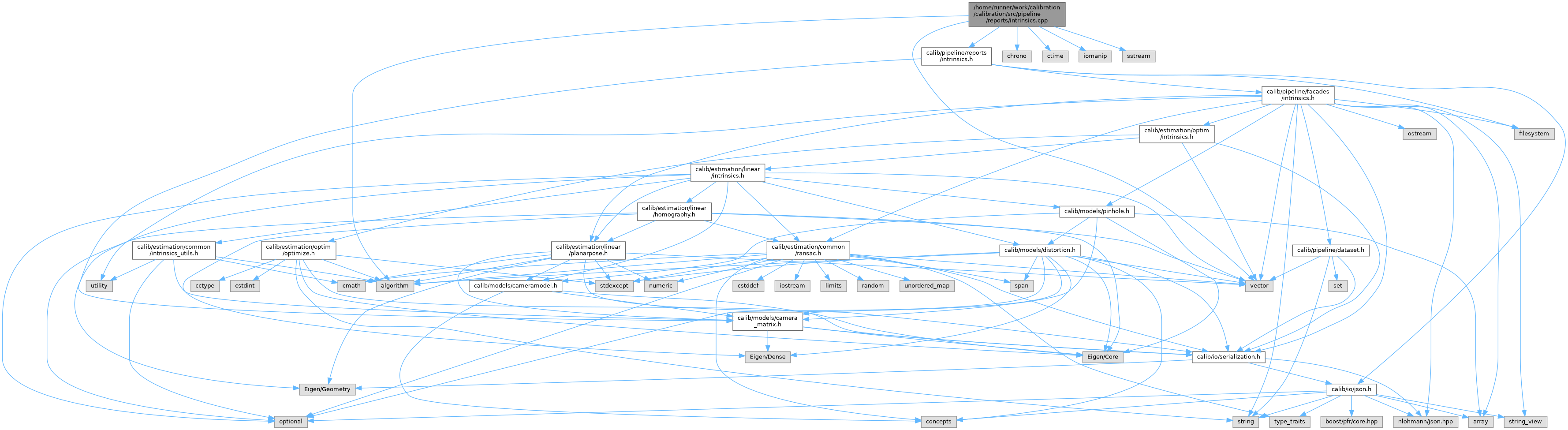
#include "calib/pipeline/reports/intrinsics.h"#include <algorithm>#include <chrono>#include <ctime>#include <iomanip>#include <sstream>#include <vector>
Include dependency graph for intrinsics.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
| namespace | calib::pipeline |
Functions | |
| auto | calib::pipeline::compute_global_rms (const IntrinsicCalibrationOutputs &out) -> double |
| auto | calib::pipeline::build_planar_intrinsics_report (const IntrinsicCalibrationConfig &cfg, const CameraConfig &cam_cfg, const PlanarDetections &detections, const IntrinsicCalibrationOutputs &outputs) -> CalibrationReport |