Loading...
Searching...
No Matches
distortion.h File Reference
Lens distortion models and correction algorithms. More...
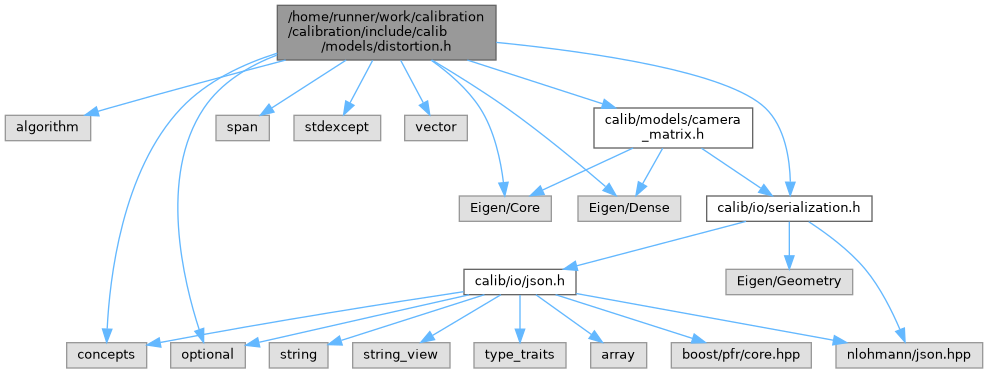
#include <algorithm>#include <concepts>#include <optional>#include <span>#include <stdexcept>#include <vector>#include <Eigen/Core>#include <Eigen/Dense>#include "calib/io/serialization.h"#include "calib/models/camera_matrix.h"
Include dependency graph for distortion.h:
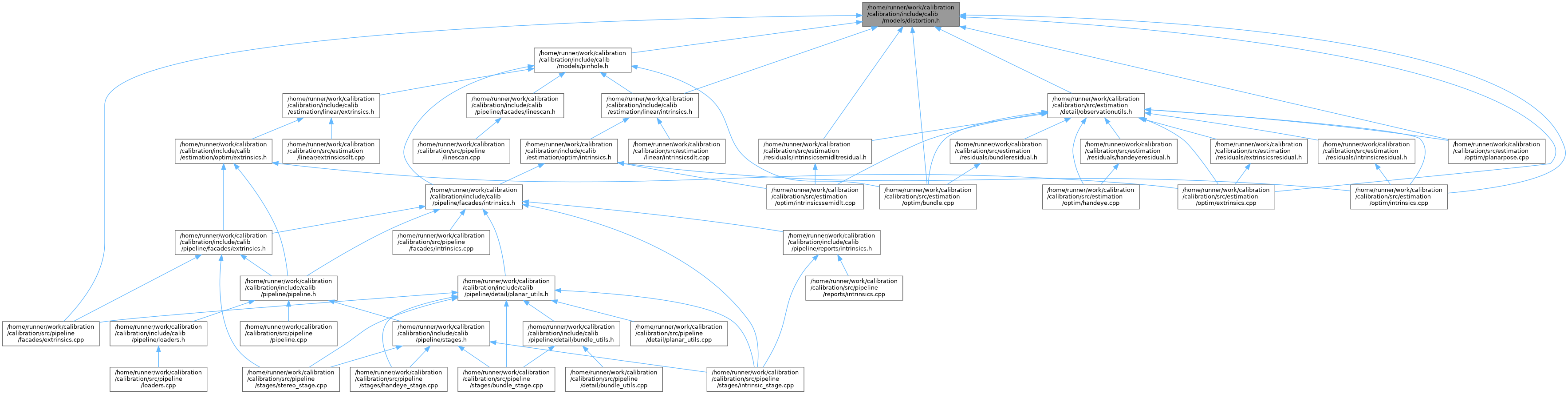
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | calib::Observation< T > |
| Observation structure for distortion parameter estimation. More... | |
| struct | calib::DistortionWithResiduals< T > |
| struct | calib::BrownConrady< Scalar_ > |
| struct | calib::DualBrownConrady< Scalar_ > |
| struct | calib::DualDistortionWithResiduals |
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
Concepts | |
| concept | calib::distortion_model |
| Concept defining the interface for lens distortion models. | |
Typedefs | |
| using | calib::BrownConradyd = BrownConrady< double > |
| using | calib::DualDistortion = DualBrownConrady< double > |
Functions | |
| template<typename T > | |
| auto | calib::apply_distortion (const Eigen::Matrix< T, 2, 1 > &norm_xy, const Eigen::Matrix< T, Eigen::Dynamic, 1 > &coeffs) -> Eigen::Matrix< T, 2, 1 > |
| Apply lens distortion to normalized coordinates. | |
| template<typename T > | |
| auto | calib::undistort (Eigen::Matrix< T, 2, 1 > norm_xy, const Eigen::Matrix< T, Eigen::Dynamic, 1 > &coeffs) -> Eigen::Matrix< T, 2, 1 > |
| template<typename Scalar > | |
| auto | calib::invert_brown_conrady (const Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > &forward) -> Eigen::Matrix< Scalar, Eigen::Dynamic, 1 > |
| template<typename T > | |
| auto | calib::fit_distortion_full (const std::vector< Observation< T > > &observations, const CameraMatrixT< T > &intrinsics, int num_radial=2, std::span< const int > fixed_indices={}, std::span< const T > fixed_values={}) -> std::optional< DistortionWithResiduals< T > > |
| template<typename T > | |
| auto | calib::fit_distortion (const std::vector< Observation< T > > &observations, const CameraMatrixT< T > &intrinsics, int num_radial=2, std::span< const int > fixed_indices={}, std::span< const T > fixed_values={}) -> std::optional< DistortionWithResiduals< T > > |
| auto | calib::fit_distortion_dual (const std::vector< Observation< double > > &observations, const CameraMatrix &intrinsics, int num_radial=2, std::span< const int > fixed_indices={}, std::span< const double > fixed_values={}) -> std::optional< DualDistortionWithResiduals > |
| void | calib::to_json (nlohmann::json &j, const DualDistortion &d) |
| void | calib::from_json (const nlohmann::json &j, DualDistortion &d) |
| void | calib::to_json (nlohmann::json &j, const BrownConradyd &d) |
| void | calib::from_json (const nlohmann::json &j, BrownConradyd &d) |
Detailed Description
Lens distortion models and correction algorithms.
This file provides comprehensive lens distortion functionality including:
- C++20 concept-based distortion model interface
- Radial and tangential distortion correction
- Forward and inverse distortion mapping
- Linear least squares design matrix computation for distortion parameters
Definition in file distortion.h.