Loading...
Searching...
No Matches
zhang.cpp File Reference
Include dependency graph for zhang.cpp:
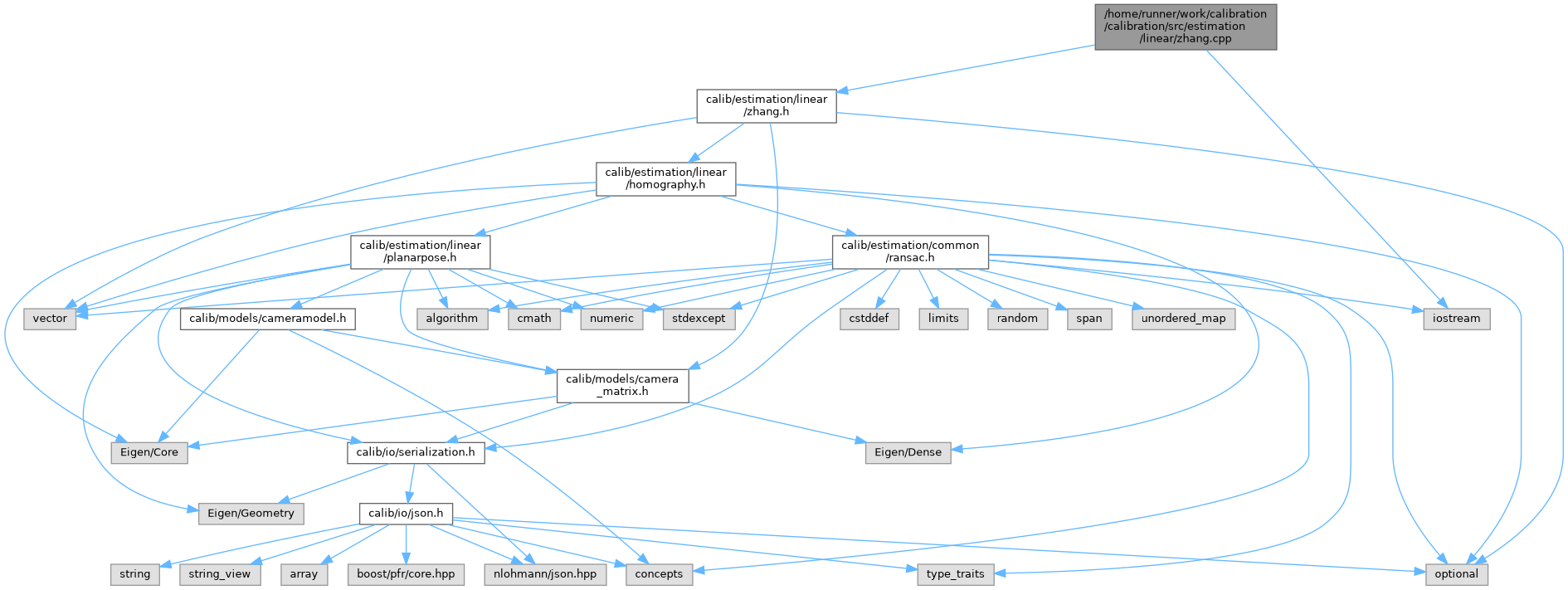
Go to the source code of this file.
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
Functions | |
| static auto | calib::zhang_bmtx (const Eigen::VectorXd &b) -> Eigen::Matrix3d |
| Constructs B = K^{-T} K^{-1} from the 6-vector b. | |
| static void | calib::check_conic_decomposition (const Eigen::Matrix3d &bmtx, const Eigen::Matrix3d &kmtx) |
| static auto | calib::kmtx_from_dual_conic (const Eigen::VectorXd &bv) -> std::optional< Eigen::Matrix3d > |
| static auto | calib::v_ij (const Eigen::Matrix3d &hmtx, int i, int j) -> Eigen::Matrix< double, 1, 6 > |
| static auto | calib::normalize_hmtx (const Eigen::Matrix3d &hmtx) -> Eigen::Matrix3d |
| static auto | calib::make_zhang_design_matrix (const std::vector< HomographyResult > &hs) -> std::optional< Eigen::MatrixXd > |
| auto | calib::zhang_intrinsics_from_hs (const std::vector< HomographyResult > &hs) -> std::optional< CameraMatrix > |