Loading...
Searching...
No Matches
observationutils.h File Reference
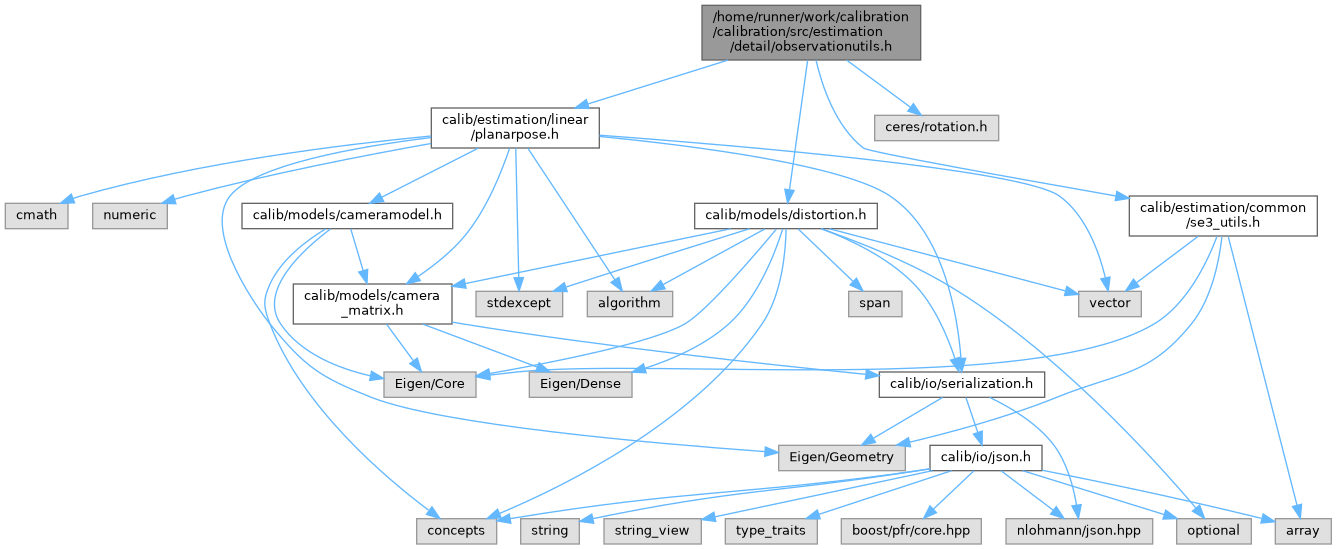
#include <calib/estimation/common/se3_utils.h>#include "calib/estimation/linear/planarpose.h"#include "calib/models/distortion.h"#include "ceres/rotation.h"
Include dependency graph for observationutils.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
Functions | |
| template<typename T > | |
| static Eigen::Matrix< T, 3, 1 > | calib::array_to_translation (const T *const arr) |
| template<typename T > | |
| static Eigen::Matrix< T, 3, 3 > | calib::quat_array_to_rotmat (const T *const arr) |
| template<typename T > | |
| std::pair< Eigen::Matrix< T, 3, 3 >, Eigen::Matrix< T, 3, 1 > > | calib::invert_transform (const Eigen::Matrix< T, 3, 3 > &rotation, const Eigen::Matrix< T, 3, 1 > &translation) |
| template<typename T > | |
| std::pair< Eigen::Matrix< T, 3, 3 >, Eigen::Matrix< T, 3, 1 > > | calib::product (const Eigen::Matrix< T, 3, 3 > &rotation1, const Eigen::Matrix< T, 3, 1 > &translation1, const Eigen::Matrix< T, 3, 3 > &rotation2, const Eigen::Matrix< T, 3, 1 > &translation2) |
| void | calib::populate_quat_tran (const Eigen::Isometry3d &pose, std::array< double, 4 > &quat, std::array< double, 3 > &translation) |
| Eigen::Quaterniond | calib::array_to_norm_quat (const std::array< double, 4 > &arr) |
| Eigen::Isometry3d | calib::restore_pose (const std::array< double, 4 > &quat, const std::array< double, 3 > &translation) |
| Eigen::Isometry3d | calib::array_to_pose (const double *pose) |
| template<typename T > | |
| static void | calib::planar_observables_to_observables (const PlanarView &planar_obs, std::vector< Observation< T > > &obs, const Eigen::Transform< T, 3, Eigen::Isometry > &camera_se3_target) |
| template<typename T > | |
| Observation< T > | calib::to_observation (const PlanarObservation &obs, const T *pose6) |