Loading...
Searching...
No Matches
handeye_stage.cpp File Reference
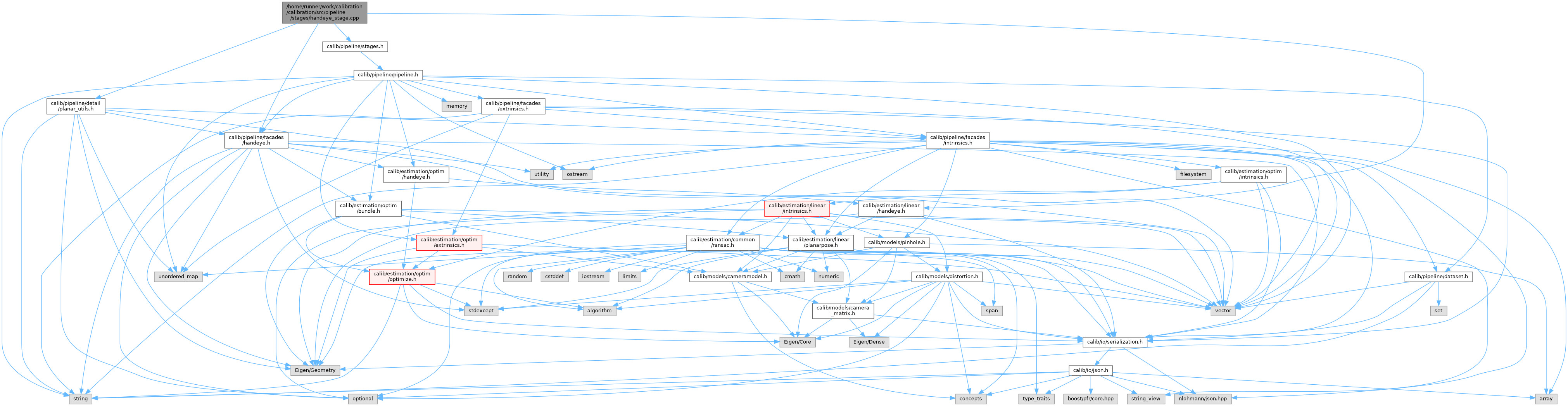
#include "calib/estimation/linear/handeye.h"#include "calib/pipeline/detail/planar_utils.h"#include "calib/pipeline/facades/handeye.h"#include "calib/pipeline/stages.h"
Include dependency graph for handeye_stage.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
| namespace | calib::pipeline |
Variable Documentation
◆ base
| std::vector<Eigen::Isometry3d> base |
Definition at line 14 of file handeye_stage.cpp.
◆ cam
| std::vector<Eigen::Isometry3d> cam |
Definition at line 15 of file handeye_stage.cpp.