Loading...
Searching...
No Matches
ceresutils.h File Reference
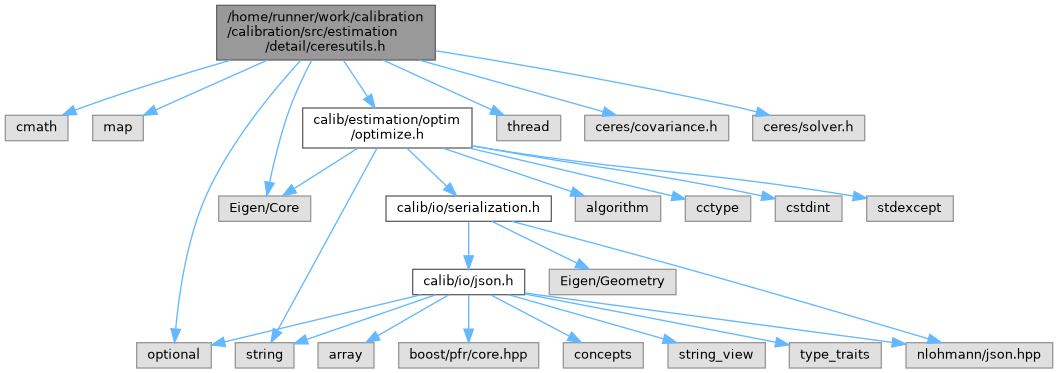
#include <cmath>#include <map>#include <optional>#include <thread>#include <Eigen/Core>#include "calib/estimation/optim/optimize.h"#include "ceres/covariance.h"#include "ceres/solver.h"
Include dependency graph for ceresutils.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | calib::ParamBlock |
| struct | calib::ProblemParamBlocks |
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
Functions | |
| void | calib::solve_problem (ceres::Problem &problem, const OptimOptions &opts, OptimResult *result) |
| auto | calib::compute_covariance (const ProblemParamBlocks &problem_param_blocks, ceres::Problem &problem, double sum_squared_residuals=0, size_t total_residuals=0) -> std::optional< Eigen::MatrixXd > |
Variables | |
| static const std::map< OptimizerType, ceres::LinearSolverType > | calib::optim_to_ceres |