Loading...
Searching...
No Matches
camera_matrix.h File Reference
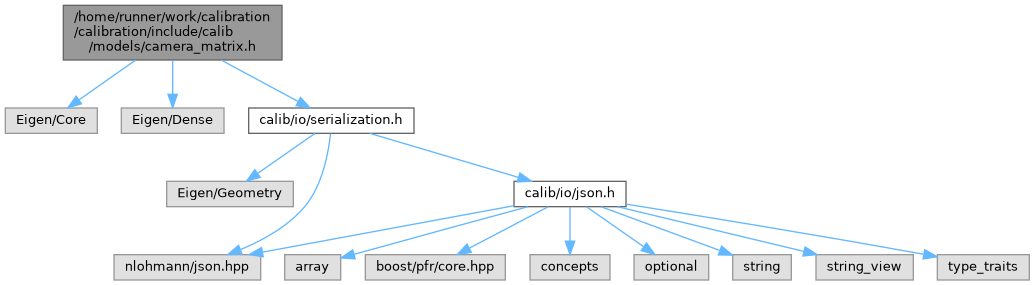
Include dependency graph for camera_matrix.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | calib::CameraMatrixT< Scalar > |
| struct | calib::CalibrationBounds |
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
Typedefs | |
| using | calib::CameraMatrix = CameraMatrixT< double > |
Functions | |
| template<typename Scalar > | |
| auto | calib::matrix (const CameraMatrixT< Scalar > &cam) -> Eigen::Matrix< Scalar, 3, 3 > |
| template<typename T , typename Scalar > | |
| auto | calib::normalize (const CameraMatrixT< Scalar > &cam, const Eigen::Matrix< T, 2, 1 > &pixel) -> Eigen::Matrix< T, 2, 1 > |
| template<typename T , typename Scalar > | |
| auto | calib::denormalize (const CameraMatrixT< Scalar > &cam, const Eigen::Matrix< T, 2, 1 > &norm_xy) -> Eigen::Matrix< T, 2, 1 > |