Loading...
Searching...
No Matches
calib::ExtrinsicOptimizationResult< CameraT > Struct Template Referencefinal
#include <extrinsics.h>
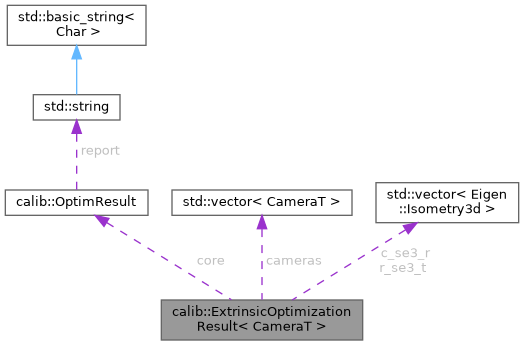
Collaboration diagram for calib::ExtrinsicOptimizationResult< CameraT >:
Public Attributes | |
| OptimResult | core |
| std::vector< CameraT > | cameras |
| std::vector< Eigen::Isometry3d > | c_se3_r |
| std::vector< Eigen::Isometry3d > | r_se3_t |
Detailed Description
template<camera_model CameraT>
struct calib::ExtrinsicOptimizationResult< CameraT >
struct calib::ExtrinsicOptimizationResult< CameraT >
Definition at line 15 of file extrinsics.h.
Member Data Documentation
◆ c_se3_r
template<camera_model CameraT>
| std::vector<Eigen::Isometry3d> calib::ExtrinsicOptimizationResult< CameraT >::c_se3_r |
Definition at line 18 of file extrinsics.h.
◆ cameras
template<camera_model CameraT>
| std::vector<CameraT> calib::ExtrinsicOptimizationResult< CameraT >::cameras |
Definition at line 17 of file extrinsics.h.
◆ core
template<camera_model CameraT>
| OptimResult calib::ExtrinsicOptimizationResult< CameraT >::core |
Definition at line 16 of file extrinsics.h.
◆ r_se3_t
template<camera_model CameraT>
| std::vector<Eigen::Isometry3d> calib::ExtrinsicOptimizationResult< CameraT >::r_se3_t |
Definition at line 19 of file extrinsics.h.
The documentation for this struct was generated from the following file:
- /home/runner/work/calibration/calibration/include/calib/estimation/optim/extrinsics.h