Loading...
Searching...
No Matches
pinhole.h File Reference
Pinhole camera model with intrinsics and distortion. More...
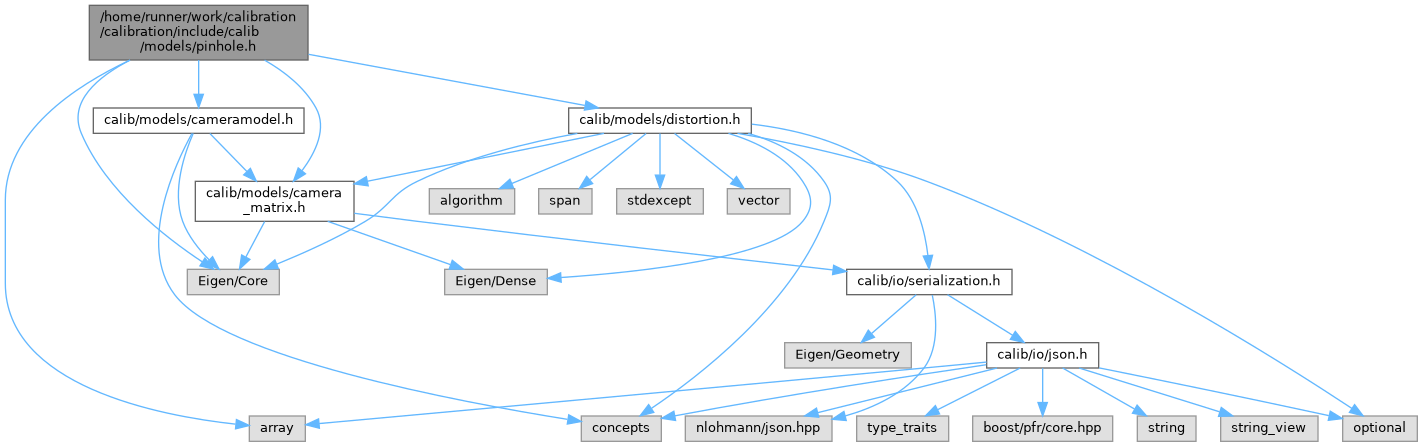
#include <Eigen/Core>#include <array>#include "calib/models/camera_matrix.h"#include "calib/models/cameramodel.h"#include "calib/models/distortion.h"
Include dependency graph for pinhole.h:
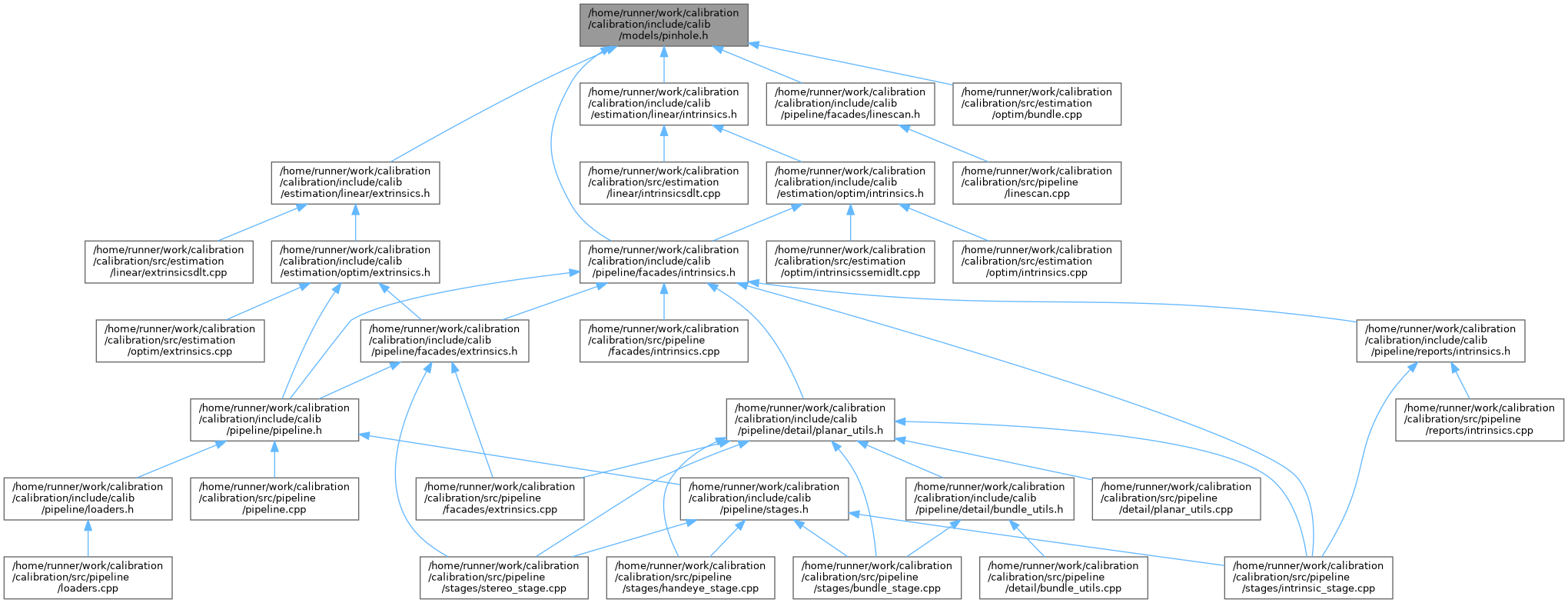
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | calib::PinholeCamera< DistortionT > |
| Pinhole camera model with intrinsics and distortion correction. More... | |
| struct | calib::CameraTraits< PinholeCamera< DistortionT > > |
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
Typedefs | |
| template<distortion_model DistortionT> | |
| using | calib::Camera = PinholeCamera< DistortionT > |
Functions | |
| template<distortion_model DistortionT> | |
| void | calib::to_json (nlohmann::json &j, const PinholeCamera< DistortionT > &cam) |
| template<distortion_model DistortionT> | |
| void | calib::from_json (const nlohmann::json &j, PinholeCamera< DistortionT > &cam) |
Detailed Description
Pinhole camera model with intrinsics and distortion.
This file provides a unified pinhole camera model that combines intrinsic parameters with lens distortion correction, supporting various distortion models through the distortion_model concept.
Definition in file pinhole.h.