Project Overview
calib-targets-rs is a single Cargo workspace with multiple publishable crates under crates/. The design is layered: calib-targets-core provides geometry and shared types, higher-level crates build on top, and the facade crate (calib-targets) is intended to be the main entry point.
Workspace layout
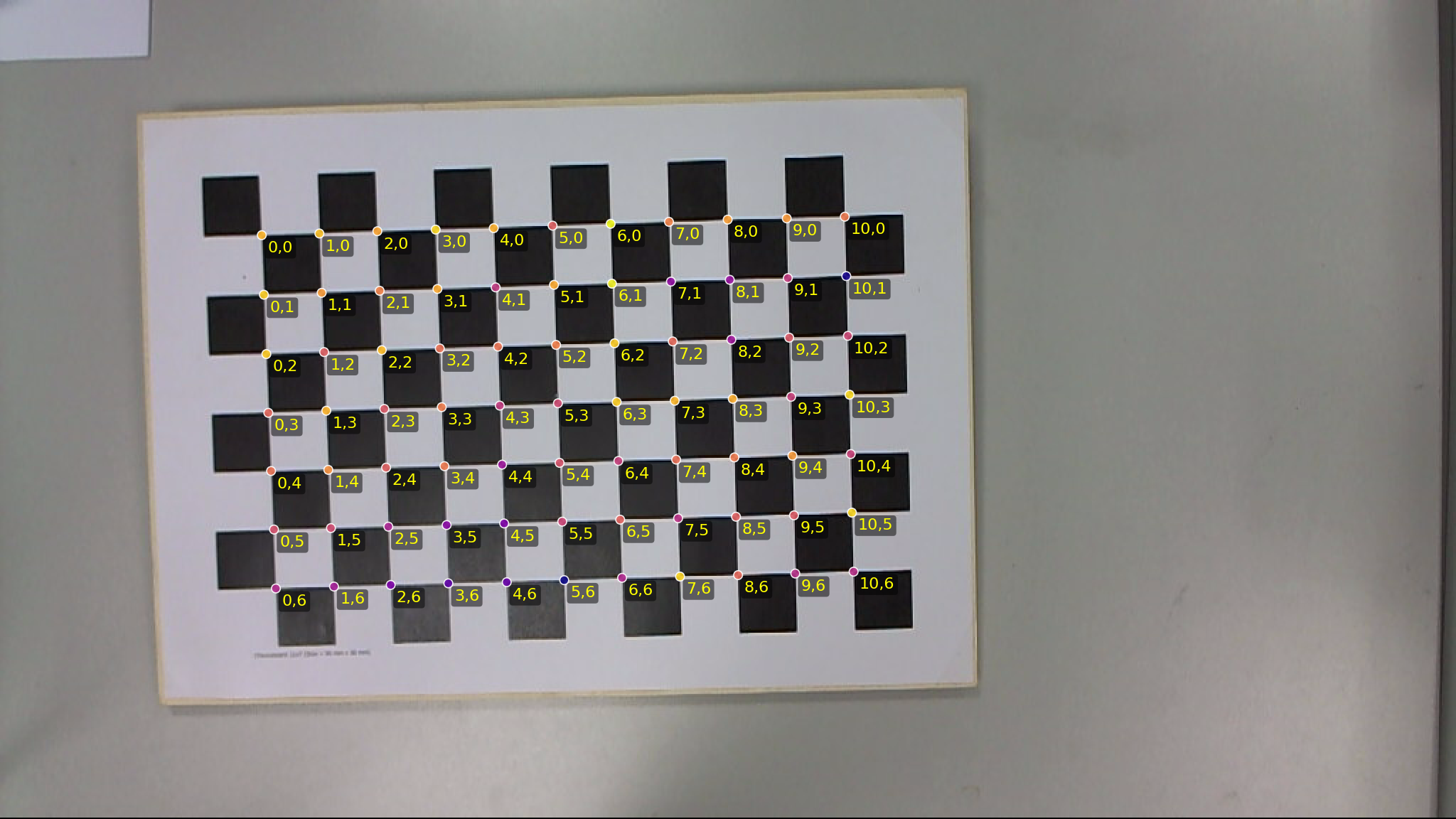
calib-targets-core: shared geometry types and utilities.calib-targets-chessboard: chessboard detection from corner clouds.calib-targets-aruco: embedded dictionaries and decoding on rectified grids.calib-targets-charuco: grid-first ChArUco detector and alignment.calib-targets-puzzleboard: self-identifying chessboard detector with absolute corner IDs from edge dots.calib-targets-marker: checkerboard marker detector (chessboard + circles).calib-targets: facade crate, currently hosting examples and future high-level APIs.
Strengths
- Clear crate boundaries with a small, geometry-first core.
- Chessboard detection pipeline is implemented end-to-end with debug outputs.
- Mesh-warp rectification supports lens distortion without assuming a single global homography.
- Examples and regression tests exist for all workflows.
Gaps and early-stage areas
- Public APIs are not yet stable.
- ArUco decoding assumes rectified grids and does not perform quad detection.
- Performance/benchmarks are not yet a focus.