Introduction
calib-targets-rs is a workspace of Rust crates for detecting and modeling planar calibration targets from corner clouds (for example, ChESS corners). The focus is geometry-first: target modeling, grid fitting, and rectification live here, while image I/O and corner detection are intentionally out of scope.
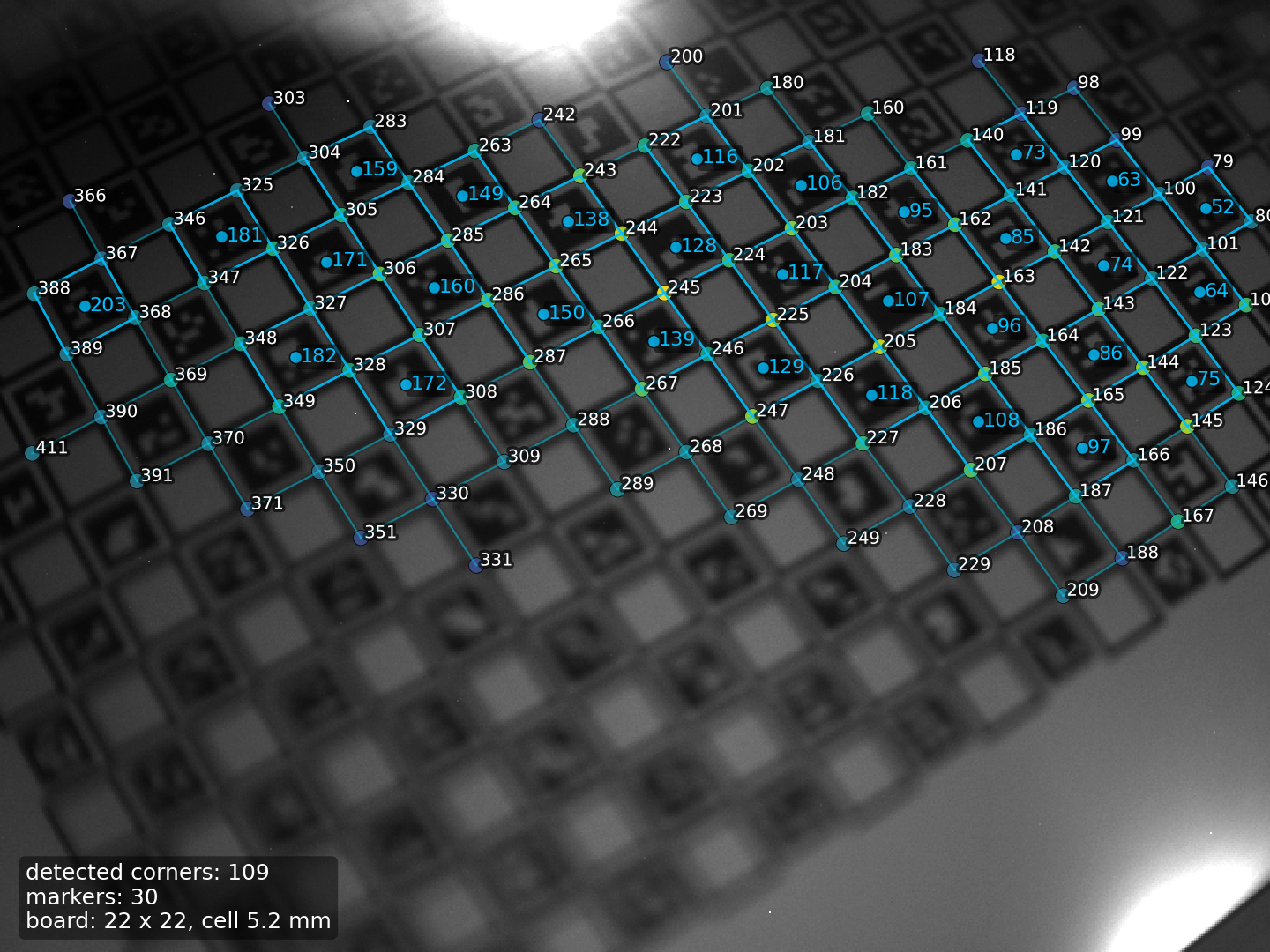 ChArUco detection overlay on a small board.
ChArUco detection overlay on a small board.
What it is:
- A small, composable set of crates for chessboard, ChArUco, PuzzleBoard, and marker-style targets.
- A set of geometric primitives (homographies, rectified views, grid coords).
- Practical examples and tests based on the
chess-cornerscrate.
What it is not:
- A replacement for your corner detector or image pipeline.
- A full calibration stack (no camera calibration or PnP here).
Recommended reading order:
- Project Overview and Conventions
- Pipeline Overview
- Crate chapters, starting with calib-targets-core and calib-targets-chessboard
Quickstart
Install the facade crate (the image feature is enabled by default):
cargo add calib-targets image
Minimal chessboard detection:
use calib_targets::detect;
use calib_targets::chessboard::DetectorParams;
use image::ImageReader;
fn main() -> Result<(), Box<dyn std::error::Error>> {
let img = ImageReader::open("board.png")?.decode()?.to_luma8();
let params = DetectorParams::default();
let result = detect::detect_chessboard(&img, ¶ms);
println!("detected: {}", result.is_some());
Ok(())
}Python bindings
Python bindings are built with maturin:
pip install maturin
maturin develop
python crates/calib-targets-py/examples/detect_chessboard.py path/to/image.png
The calib_targets module exposes detect_chessboard, detect_charuco,
detect_puzzleboard, and detect_marker_board. The public API is
dataclass-first: config inputs are typed models and detector results are typed
dataclasses with to_dict()/from_dict(...) helpers for JSON interoperability.
detect_charuco requires params and the board lives in params.board.
For marker boards, target_position is populated only when
params.layout.cell_size is set and alignment succeeds.
MSRV: Rust 1.88 (stable).