Introduction
ringgrid is a pure-Rust library for detecting dense ring calibration targets. It detects markers with subpixel accuracy, decodes unique IDs from the shipped baseline 893-codeword profile (with an opt-in extended profile available for larger ID spaces), estimates a board-to-image homography, and returns structured results ready for downstream camera calibration.
Since 0.8, targets are described compositionally rather than as a single fixed layout: a hex or rect lattice, coded (16-sector, ID-bearing) or plain rings, and optional origin fiducials for plain targets that carry no per-marker identity. See The Compositional Target Model for the full picture.
No OpenCV bindings — all image processing is implemented in Rust.
| Printable target | Detection overlay |
|---|---|
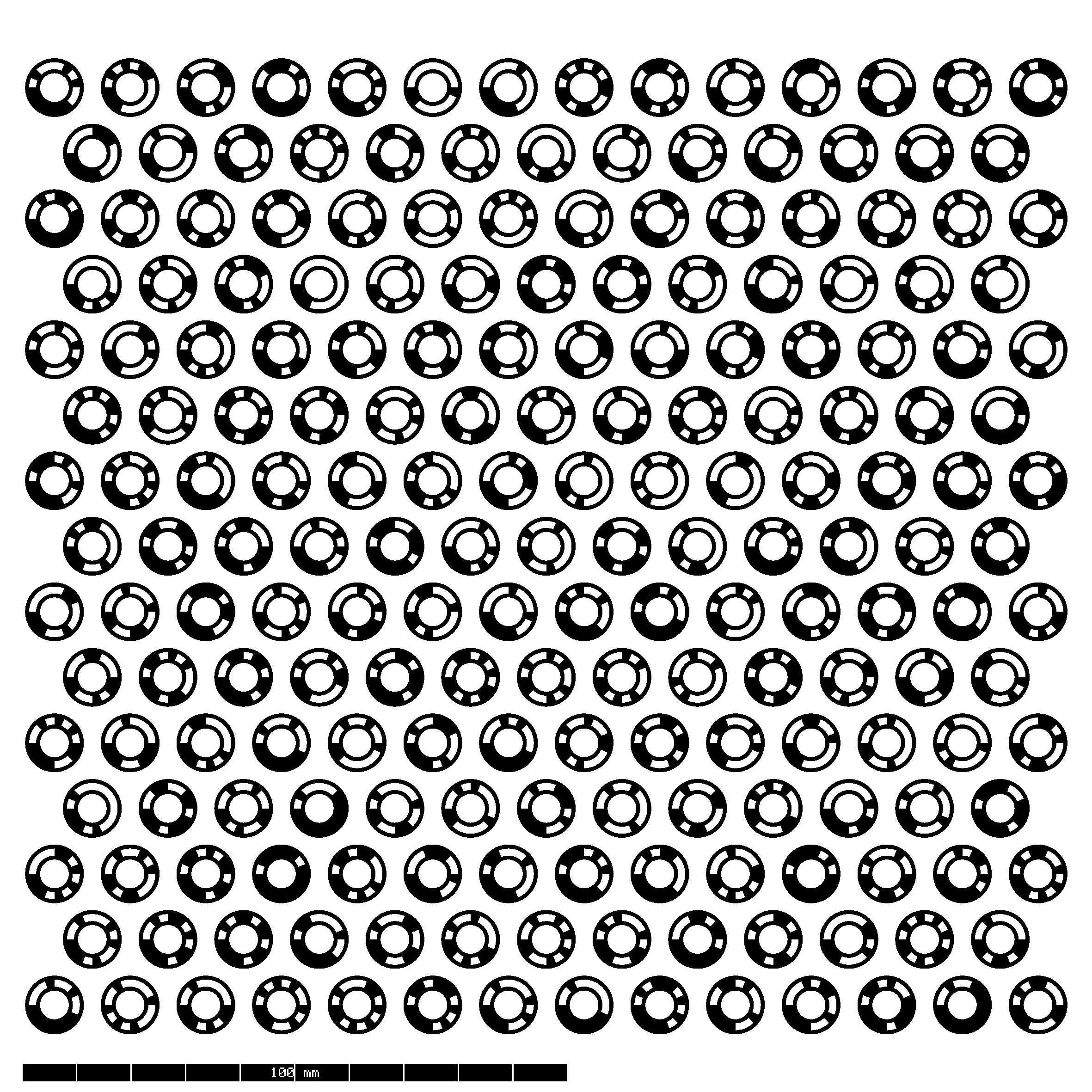 | 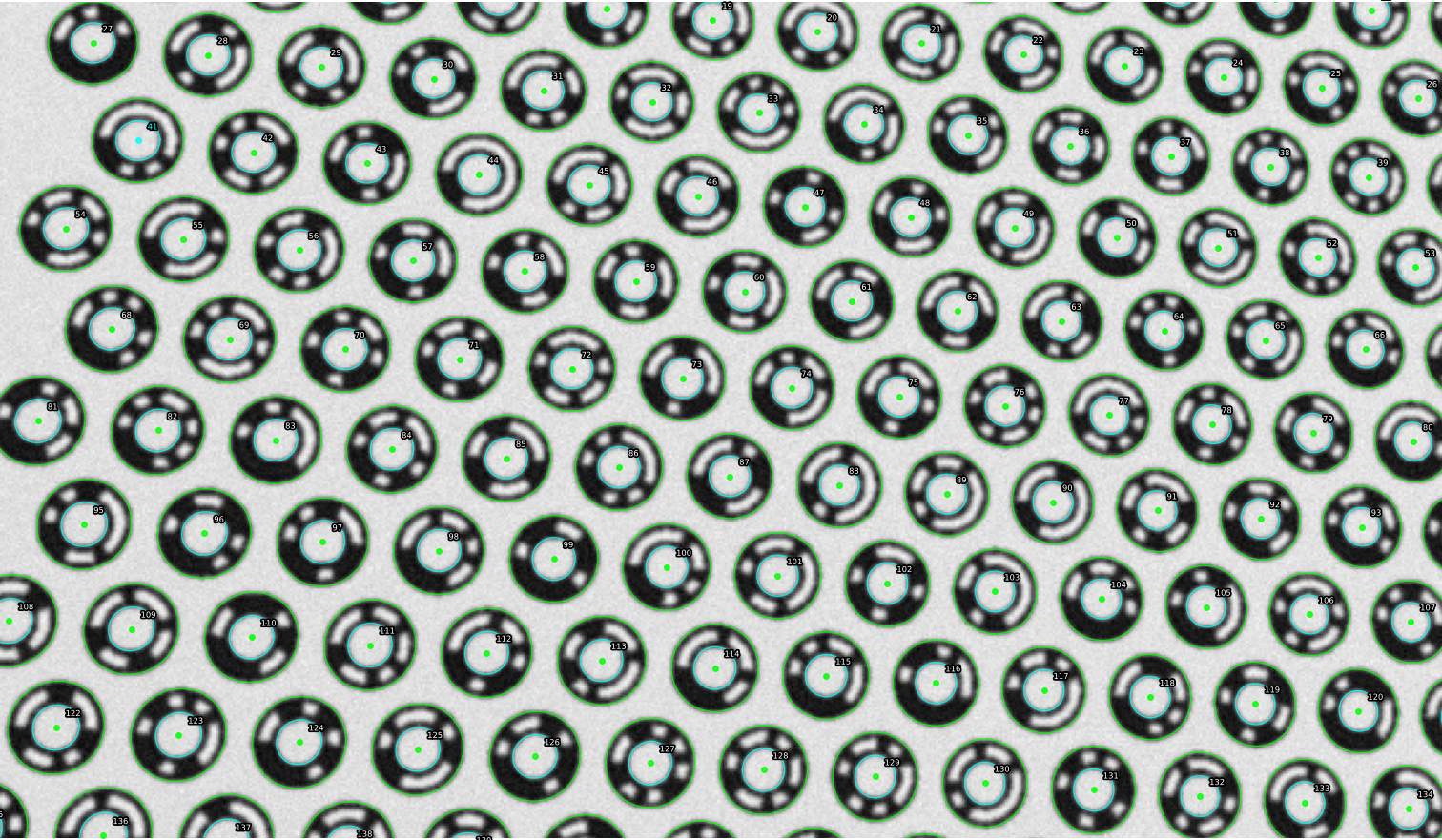 |
The Problem
Camera calibration requires detecting fiducial markers — known patterns printed on a calibration target — with high geometric precision. Traditional approaches use checkerboard corners or square markers (ArUco). These patterns have limitations:
- Checkerboards provide subpixel corner accuracy but carry no per-corner identity, making automatic correspondence ambiguous when the full board is not visible.
- Square markers (ArUco, AprilTag) encode identity in a binary grid, but their corners are detected via contour intersection, which limits subpixel precision.
ringgrid introduces a different target design: concentric ring markers with binary-coded sectors, arranged on a hex lattice.
The Solution
Each ringgrid marker consists of two concentric rings — an outer ring and an inner ring — separated by a 16-sector binary code band that encodes a unique ID. This design provides three key advantages:
-
Subpixel edge detection. Ring boundaries produce strong, omnidirectional intensity gradients. The detector samples edge points along radial rays and fits an ellipse using the Fitzgibbon direct least-squares method, achieving center localization well below one pixel.
-
Projective center correction. Under perspective projection, the center of a fitted ellipse is not the true projected center of the circle. ringgrid fits both the outer and inner ring ellipses and uses their conic pencil to recover the unbiased projected center — without requiring camera intrinsics.
-
Large identification capacity. The 16-sector binary code band ships with a stable 893-codeword baseline profile at minimum cyclic Hamming distance 2, plus an opt-in 2180-codeword extended profile when larger ID capacity matters more than the baseline ambiguity guarantee without introducing new polarity ambiguity beyond the shipped baseline.
What You Get
The detector returns a DetectionResult containing:
- A list of
DetectedMarkerstructs, each with:- Decoded ID (from the active codebook profile; baseline by default)
- Subpixel center in image coordinates
- Board coordinates in millimeters when the ID is valid for the active layout
- Fitted outer and inner ellipses
- Quality metrics (fit residuals, decode confidence) and detection source
- A board-to-image homography (when enough markers are decoded)
- Coordinate frame metadata describing the output conventions
See Detection Output Format for the exact JSON shape written
by the CLI and the corresponding Rust DetectionResult fields.
Detection Modes
ringgrid supports four high-level detection modes:
- Simple detection — single-pass detection in image coordinates. No distortion correction.
- Adaptive scale detection — multi-tier detection that auto-selects scale bands (or uses explicit tiers) for scenes with large marker size variation.
- External pixel mapper — two-pass detection using a user-provided coordinate mapping (e.g., camera distortion model). Pass-1 finds seed positions, pass-2 refines in the undistorted working frame.
- Self-undistort — automatic estimation of a single-parameter division distortion model from the detected ellipses, followed by a corrected second pass. No external calibration required.
Who This Is For
This book is for engineers integrating high-precision fiducial detection into:
- Camera calibration pipelines
- Photogrammetry and 3D reconstruction
- Computer vision applications requiring high-precision fiducial detection
- Metrology and measurement systems
ringgrid is a Rust library, but you do not have to write Rust to use it: it also ships Python, C/C++, and WebAssembly bindings and a command-line tool — see Language Bindings.
Book Structure
- Fast Start — one-command workflow to generate
target_spec.json+ printable SVG/PNG and run first detection - Targets — the compositional target model: hex/rect lattices, coded/plain marker rings, optional origin fiducials
- Marker Design — anatomy of the ring marker, coding scheme, and hex lattice layout
- Detection Pipeline — a walkthrough of every detection stage
- Mathematical Foundations — full derivations of the core algorithms (ellipse fitting, RANSAC, homography, projective center recovery, division model)
- Using ringgrid — configuration, output types, detection modes, and CLI usage
- Language Bindings — Python, C/C++, and WebAssembly/npm
Upgrading across a pre-1.0 release? Per-interface migration notes live in
docs/migrations/.