Loading...
Searching...
No Matches
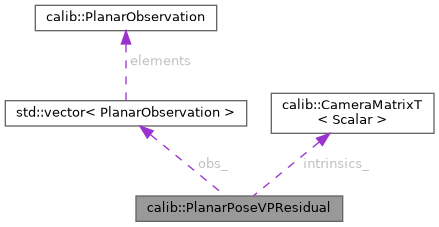
calib::PlanarPoseVPResidual Struct Referencefinal
Collaboration diagram for calib::PlanarPoseVPResidual:
Public Member Functions | |
| PlanarPoseVPResidual (PlanarView obs, int num_radial, CameraMatrix intrinsics) | |
| template<typename T > | |
| bool | operator() (const T *pose6, T *residuals) const |
| Eigen::VectorXd | solve_distortion_for (const Pose6 &pose6) const |
Public Attributes | |
| PlanarView | obs_ |
| const CameraMatrix | intrinsics_ |
| int | num_radial_ |
Detailed Description
Definition at line 31 of file planarpose.cpp.
Constructor & Destructor Documentation
◆ PlanarPoseVPResidual()
|
inline |
Definition at line 36 of file planarpose.cpp.
Member Function Documentation
◆ operator()()
template<typename T >
|
inline |
Definition at line 40 of file planarpose.cpp.
◆ solve_distortion_for()
|
inline |
Definition at line 60 of file planarpose.cpp.
Member Data Documentation
◆ intrinsics_
| const CameraMatrix calib::PlanarPoseVPResidual::intrinsics_ |
Definition at line 33 of file planarpose.cpp.
◆ num_radial_
| int calib::PlanarPoseVPResidual::num_radial_ |
Definition at line 34 of file planarpose.cpp.
◆ obs_
| PlanarView calib::PlanarPoseVPResidual::obs_ |
Definition at line 32 of file planarpose.cpp.
The documentation for this struct was generated from the following file:
- /home/runner/work/calibration/calibration/src/estimation/optim/planarpose.cpp