Loading...
Searching...
No Matches
posefromhomography.h File Reference
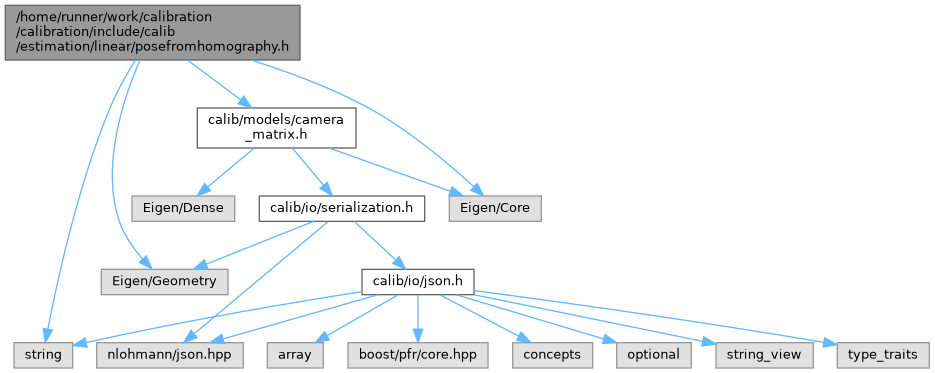
#include <string>#include <Eigen/Core>#include <Eigen/Geometry>#include "calib/models/camera_matrix.h"
Include dependency graph for posefromhomography.h:
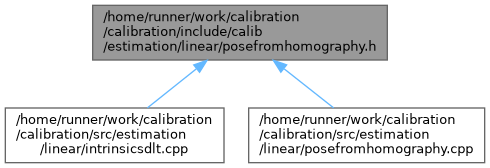
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | calib::PoseFromHResult |
| Recover target->camera pose (R,t) from camera matrix K and planar homography H. More... | |
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
Functions | |
| auto | calib::pose_from_homography (const CameraMatrix &kmtx, const Eigen::Matrix3d &hmtx) -> PoseFromHResult |
| Estimates the camera pose from a homography matrix. | |
| auto | calib::homography_consistency_fro (const CameraMatrix &kmtx, const Eigen::Isometry3d &c_se3_t, const Eigen::Matrix3d &hmtx) -> double |
| A quick consistency check. | |