Loading...
Searching...
No Matches
handeye.h File Reference
Hand-eye calibration algorithms and utilities. More...
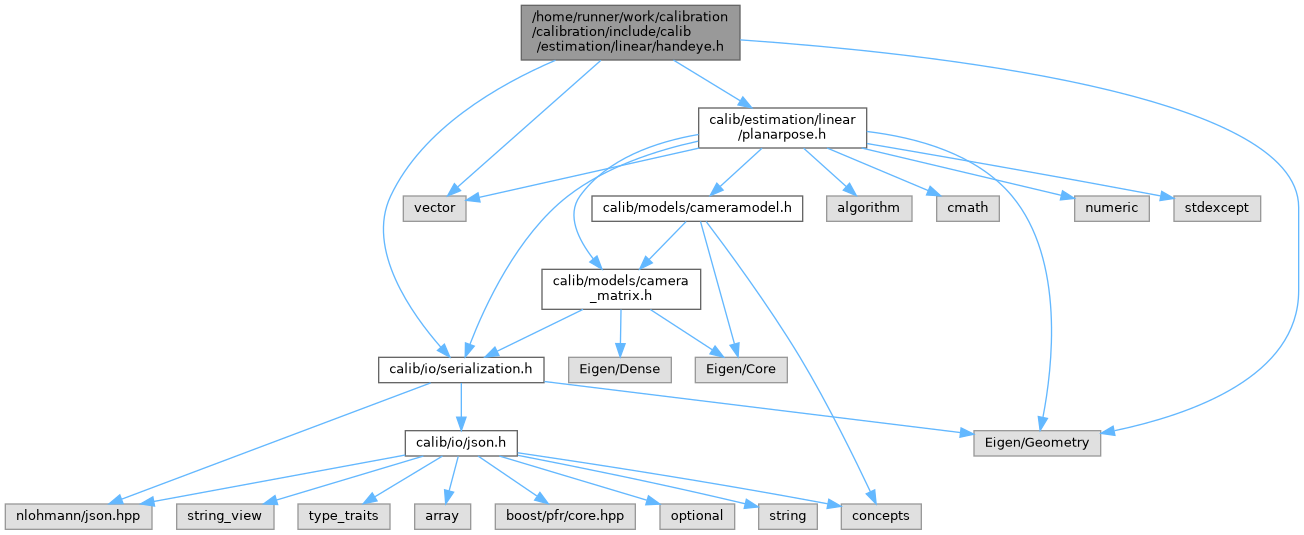
#include <vector>#include <Eigen/Geometry>#include "calib/estimation/linear/planarpose.h"#include "calib/io/serialization.h"
Include dependency graph for handeye.h:
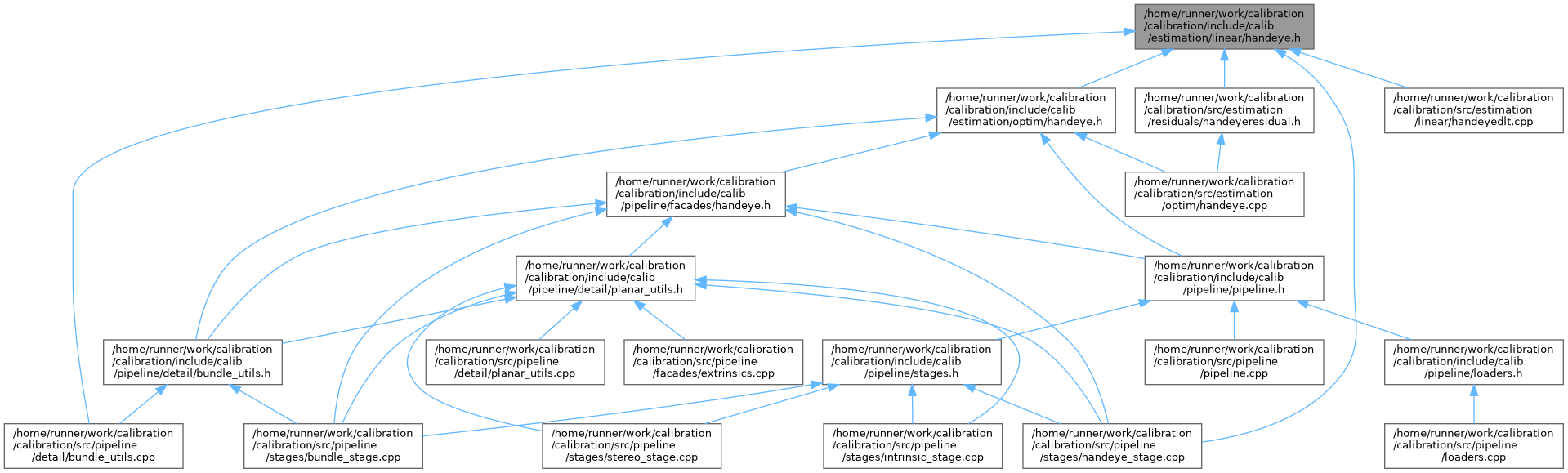
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | calib::MotionPair |
| Motion pair structure for hand-eye calibration. More... | |
Namespaces | |
| namespace | calib |
| Linear multi-camera extrinsics initialisation (DLT) | |
Functions | |
| auto | calib::build_all_pairs (const std::vector< Eigen::Isometry3d > &base_se3_gripper, const std::vector< Eigen::Isometry3d > &cam_se3_target, double min_angle_deg=1.0, bool reject_axis_parallel=true, double axis_parallel_eps=1e-3) -> std::vector< MotionPair > |
| Generate all valid motion pairs from pose sequences. | |
| auto | calib::estimate_handeye_dlt (const std::vector< Eigen::Isometry3d > &base_se3_gripper, const std::vector< Eigen::Isometry3d > &camera_se3_target, double min_angle_deg=1.0) -> Eigen::Isometry3d |
| Estimates the hand-eye transformation using the Tsai-Lenz algorithm with all pairs of input transformations and weighted averaging. | |
Detailed Description
Hand-eye calibration algorithms and utilities.
This file provides comprehensive hand-eye calibration functionality including:
- Tsai-Lenz algorithm for AX=XB problem solving
- Motion pair generation and filtering
Definition in file handeye.h.