calib-targets-puzzleboard
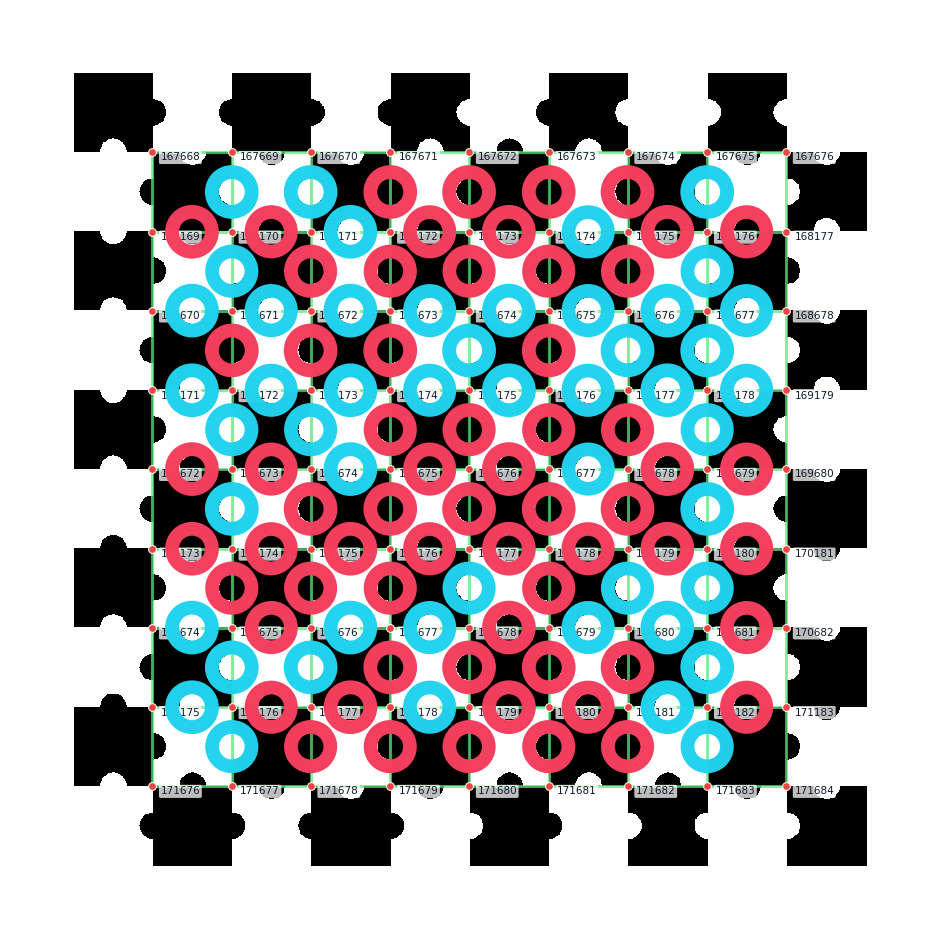
calib-targets-puzzleboard detects PuzzleBoard targets: checkerboards whose
interior edge midpoints carry binary dots. The dots identify the board position
inside a 501 x 501 master pattern, so a visible fragment can still produce
absolute corner IDs and object-space coordinates.
PuzzleBoard is based on Stelldinger 2024, arXiv:2409.20127.
Target Model
PuzzleBoardSpec describes the printable board:
rows,cols: square counts, not inner-corner counts.cell_size: physical square size.origin_row,origin_col: top-left square in the 501 x 501 master pattern.
Detected inner corners are returned as LabeledCorner values with:
grid: absolute master corner coordinates(i, j).id:j * 501 + i.target_position:(i * cell_size, j * cell_size).
Bit Layout
The board uses two embedded cyclic maps:
- map A, shape
(3, 167), for horizontal interior edges. - map B, shape
(167, 3), for vertical interior edges.
Dots encode bits directly: white dot = 0, black dot = 1.
corner (i,j) ---- A(j,i) ---- corner (i+1,j)
| |
B(j,i) B(j,i+1)
| |
corner (i,j+1) -- A(j+1,i) -- corner (i+1,j+1)
The committed blobs are src/data/map_a.bin and src/data/map_b.bin.
generate-puzzleboard-code-maps and verify-puzzleboard-code-maps are kept as
repo tools so the runtime detector does no map construction.
Detection Pipeline
The flow is grid-first:
- Run ChESS corner detection.
- Assemble one or more chessboard grid components.
- Sample every visible interior edge midpoint and estimate a bit confidence.
- Drop bits below
decode.min_bit_confidence. - Decode against the master maps over all D4 rotations/reflections.
- Assign absolute IDs and target-space positions to inlier corners.
The default decode.min_window is 4, meaning the detector requires enough
edge samples for a 4 x 4 square fragment after confidence filtering.
Rust Facade Example
use calib_targets::{detect, puzzleboard::{PuzzleBoardParams, PuzzleBoardSpec}};
fn main() -> Result<(), Box<dyn std::error::Error>> {
let img = image::open("testdata/puzzleboard_small.png")?.to_luma8();
let spec = PuzzleBoardSpec::new(10, 10, 12.0)?;
let params = PuzzleBoardParams::for_board(&spec);
let result = detect::detect_puzzleboard(&img, ¶ms)?;
println!("{} corners", result.detection.corners.len());
Ok(())
}For threshold-sensitive images, use:
#![allow(unused)]
fn main() {
use calib_targets::{detect, puzzleboard::{PuzzleBoardParams, PuzzleBoardSpec}};
let img = image::GrayImage::new(1, 1);
fn run(img: &image::GrayImage) -> Result<(), Box<dyn std::error::Error>> {
let spec = PuzzleBoardSpec::new(10, 10, 12.0)?;
let configs = PuzzleBoardParams::sweep_for_board(&spec);
let result = detect::detect_puzzleboard_best(img, &configs)?;
let _ = result;
Ok(()) }
}Search Modes
The default PuzzleBoardSearchMode::Full scans all 501 × 501 × 8 (D4, origin) candidates against the full master code. When the caller already
knows which board they printed, PuzzleBoardSearchMode::FixedBoard
matches observations directly against that declared board’s own bit
pattern under 8 × (rows+1)² candidate shifts:
#![allow(unused)]
fn main() {
use calib_targets::{detect, puzzleboard::{PuzzleBoardParams, PuzzleBoardSearchMode, PuzzleBoardSpec}};
let img = image::GrayImage::new(1, 1);
fn run(img: &image::GrayImage) -> Result<(), Box<dyn std::error::Error>> {
let spec = PuzzleBoardSpec::new(50, 50, 1.0)?;
let mut params = PuzzleBoardParams::for_board(&spec);
params.decode.search_mode = PuzzleBoardSearchMode::FixedBoard;
let _ = detect::detect_puzzleboard(img, ¶ms)?;
Ok(()) }
}Partial-view guarantee: for a given printed board, any subset of its corners decodes to the same master IDs a full-view decode would produce. This applies equally to single-camera captures that only frame part of a large board and to multi-camera rigs where each camera sees a different fragment — in both cases overlapping corners across frames or cameras share master IDs without further stitching.
The decoder’s per-view master origin is otherwise not fixed — it shifts
with which print-corner the chessboard stage picks as local (0, 0),
which depends on what the camera sees. FixedBoard sidesteps that
entirely by scoring against the board rather than against the full
master.
FixedBoard runs 8 × (rows + 1)² × N operations, where N is the
number of confidence-filtered edge observations. At typical edge counts
even a 50 × 50 board decodes in well under 10 ms natively. The default
stays Full; switch via params.decode.search_mode as shown.
Printable Example
Canonical sample specs live in:
testdata/printable/puzzleboard_small.jsontestdata/printable/puzzleboard_mid.json
Generate one from the workspace root:
cargo run -p calib-targets --example generate_printable -- \
testdata/printable/puzzleboard_small.json \
tmpdata/printable/puzzleboard_small
Print the SVG at 100 percent scale. The generated PNG is intended for previews and regression tests.