calib-targets-charuco
calib-targets-charuco combines chessboard detection with ArUco decoding to detect ChArUco boards. ChArUco dictionaries and board layouts are fully compatible with OpenCV’s aruco/charuco implementation. The flow is grid-first:
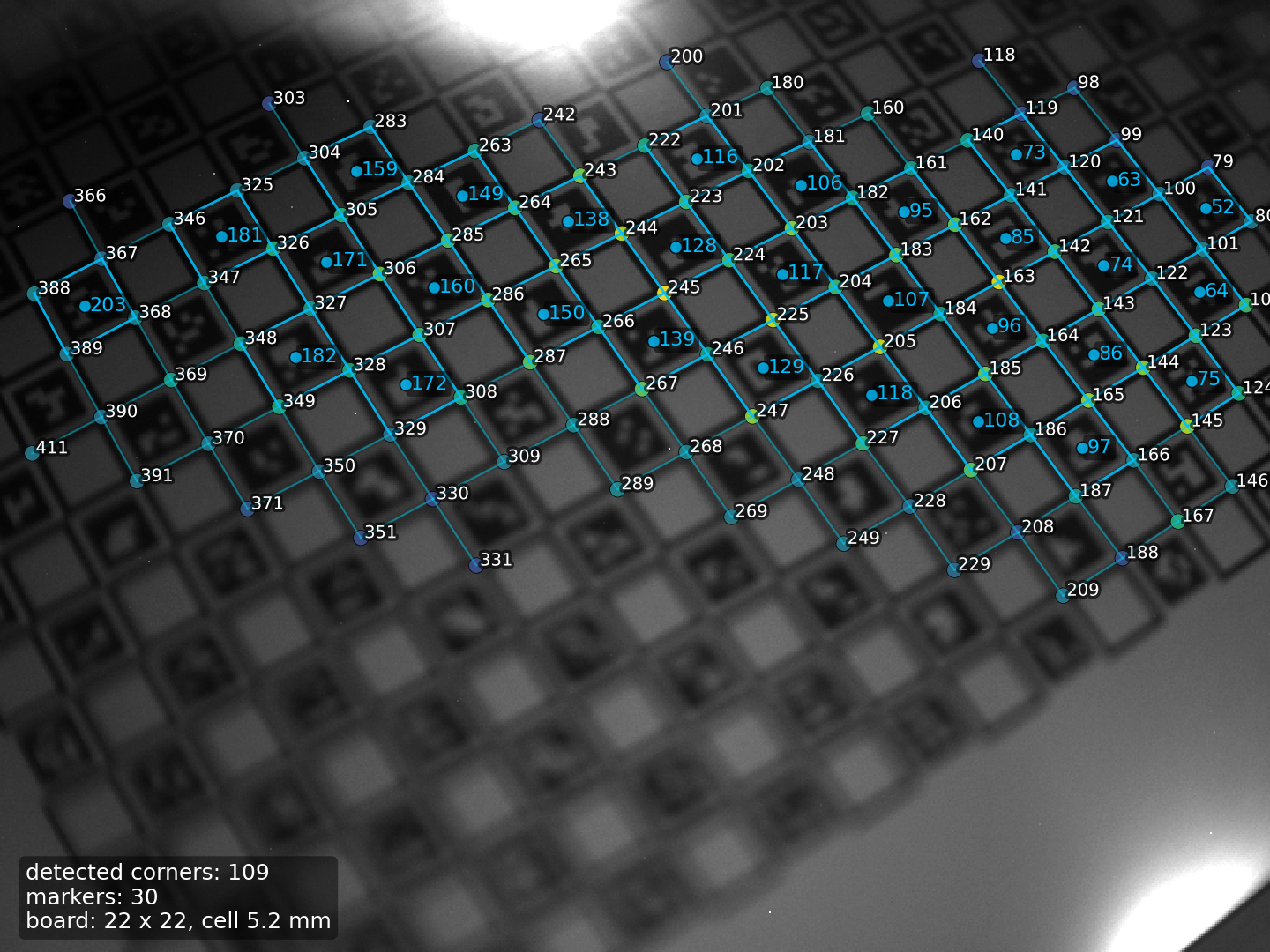 ChArUco detection overlay with assigned corner IDs.
ChArUco detection overlay with assigned corner IDs.
- Detect a chessboard grid from ChESS corners.
- Build per-cell quads from the detected grid.
- Decode markers per cell (no full-image warp).
- Align marker detections to a board specification and assign corner IDs.
Board specification
CharucoBoardSpecdescribes the board geometry:rows,colsare square counts (not inner corners).cell_sizeis the physical square size.marker_size_relis the marker size relative to a square.dictionaryselects the marker dictionary.marker_layoutdefines the placement scheme.
CharucoBoardvalidates and precomputes marker placement.
Detector
CharucoParams::for_boardprovides a reasonable default configuration.CharucoDetector::detectreturns aCharucoDetectionResultwith:detection: labeled corners with ChArUco IDs, filtered to marker-supported corners.markers: decoded marker detections in rectified grid coordinates (with optionalcorners_img).alignment: grid alignment from detected grid coordinates into board coordinates.
Per-cell decoding
The detector decodes markers per grid cell. This avoids building a full rectified image and keeps the work proportional to the number of valid squares. If you need a full rectified image for visualization, use the rectification helpers in calib-targets-chessboard on a detected grid.
Alignment and refinement
Alignment maps decoded marker IDs to board positions using a small set of grid transforms and a translation vote. Once an alignment is found, the detector re-decodes markers at their expected cell locations and re-solves the alignment to filter out inconsistencies.
This two-stage approach helps reject spurious markers while keeping the final corner IDs consistent.
Tuning notes
scan.inset_fractrades off robustness vs. sensitivity. The defaults infor_boarduse a slightly smaller inset (0.06) to improve real-image decoding.min_marker_inlierscontrols how many aligned markers are required to accept a detection.
Status
The current implementation focuses on the OpenCV-style layout and is intentionally conservative about alignment. Extensions for more layouts and improved robustness are planned (see the roadmap).
For alignment details, see ChArUco Alignment and Refinement.